|
Guowei Shi (石国维) I'm a master student in the Department of Mechanical and Energy Engineering at Southern University of Science and Technology (SUSTech), under the supervision of Prof. Zhenzhong Jia. I graduated from SUSTech in 2022 with a Bachelor of Engineering in Robotics Engineering, where I was advised by Prof. Wei Zhang. My current research focuses on contact perception and control for dynamic legged locomotion in challenging environments. My long-term goal is to develop robotic systems capable of exploring, understanding, and interacting with the physical world. Email:12232336@mail.sustech.edu.cn / CV / Google Scholar / Github / Linkedin |

|
Publications(* indicates equal contribution, ** indicates corresponding authors) |

|
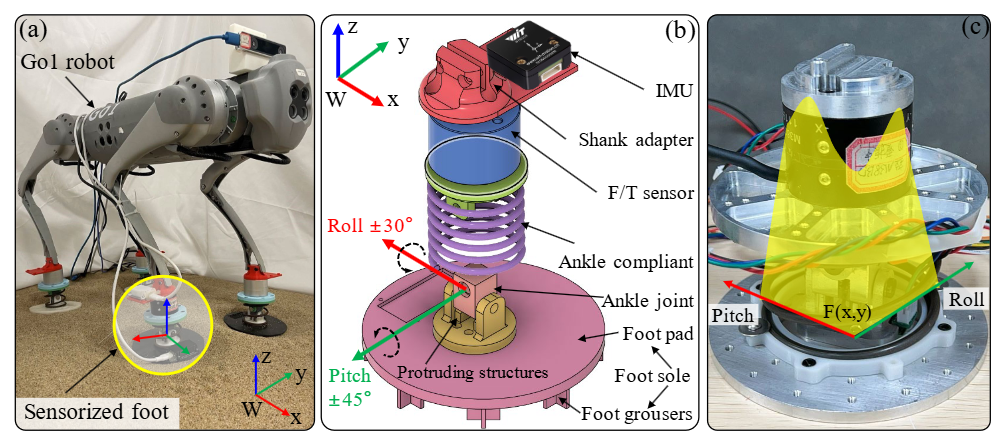
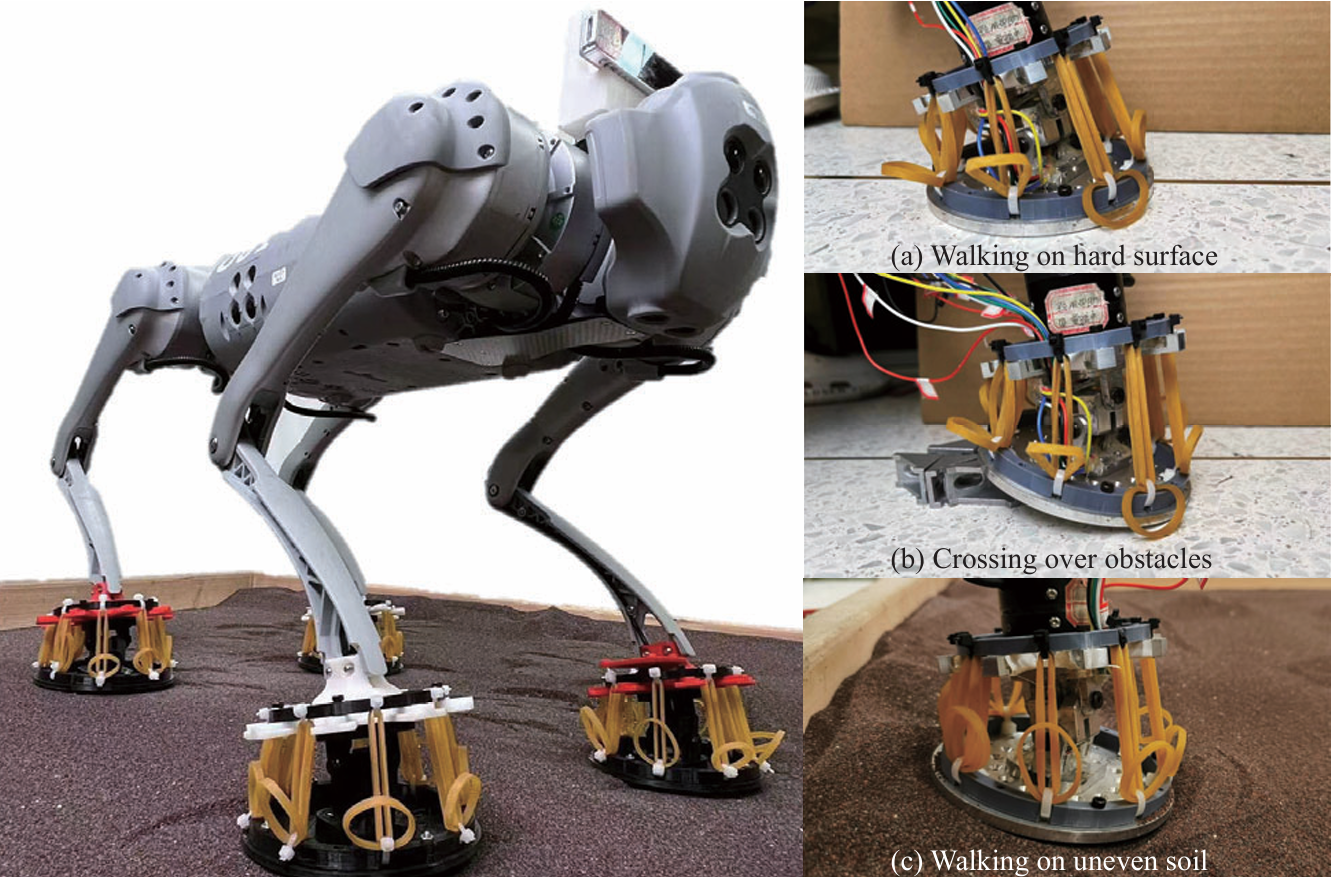
Foot Vision: A Vision-Based Multi-Functional Sensorized Foot for Quadruped Robots
Guowei Shi*, Chen Yao*, Xin Liu, Yuntian Zhao, Zheng Zhu, Zhenzhong Jia** IEEE Robotics and Automation Letters (RA-L), 2024 Paper / Video / IEEE Spectrum We proposed a vision-based sensorized foot for dynamic legged robots, capable of simultaneously sensing contact forces and torques, estimating contact surface inclination, and perceiving foot-terrain interaction using only one camera. |
|
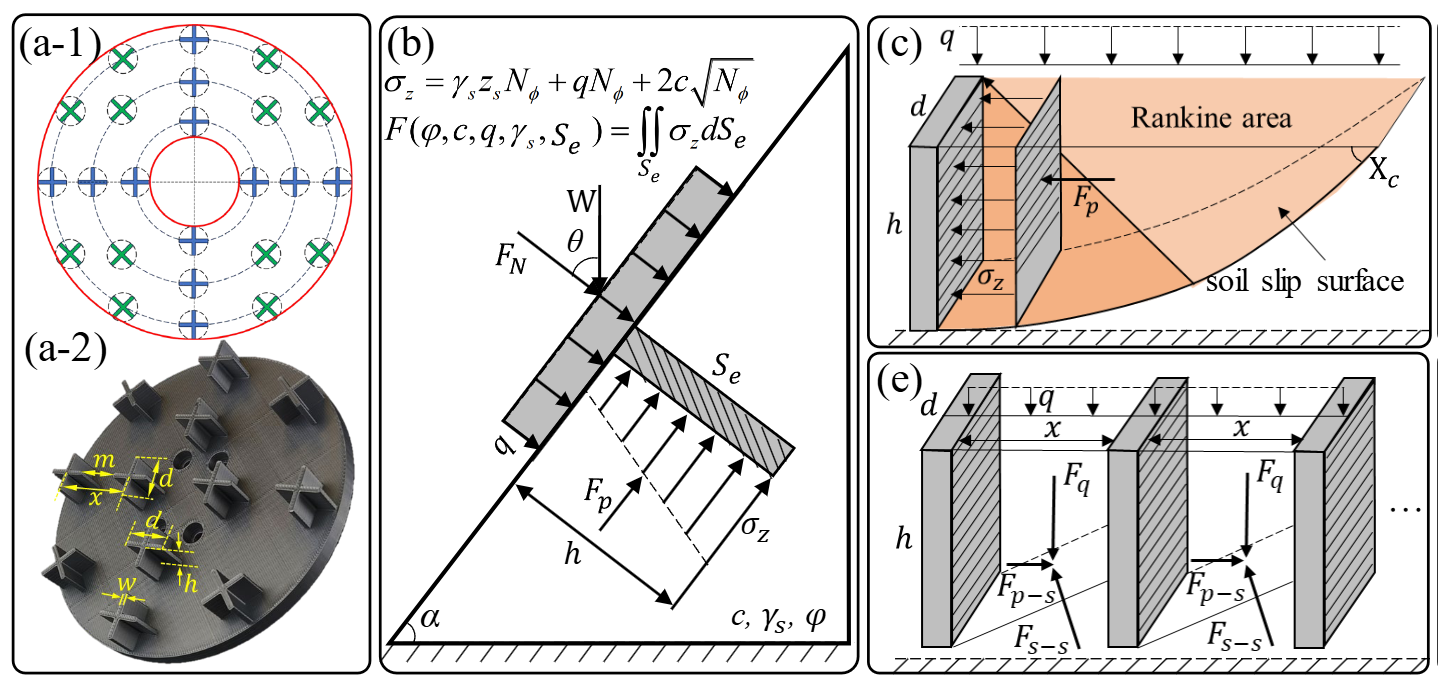
STAF: Interaction-Based Design and Evaluation of Sensorized Terrain-Adaptive Foot for Legged Robot Traversing on Soft Slope
Chen Yao, Guowei Shi, Peng Xu, Shipeng Lyu, Zhiyang Qiang, Zheng Zhu, Liang Ding, Zhenzhong Jia** IEEE/ASME Transactions on Mechatronics (T-MECH), 2024 Paper We proposed an optimization method based on terrain mechanics to improve the studs of sensorized planar feet. Extensive experiments demonstrated that the optimized design significantly enhances the mobility of quadruped robots on granular slopes. |
|
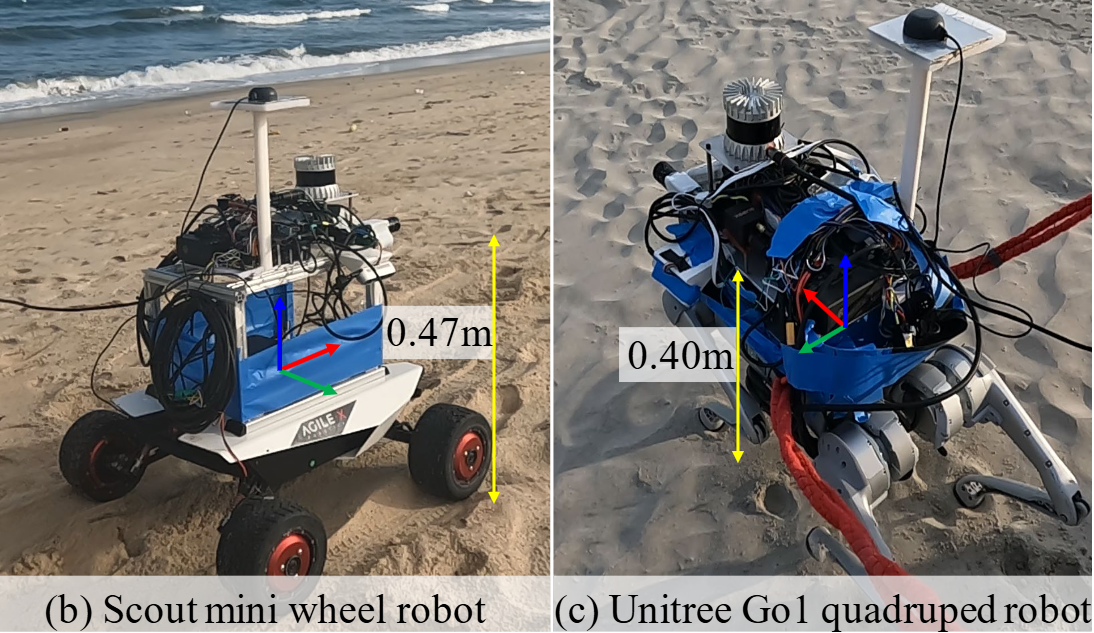
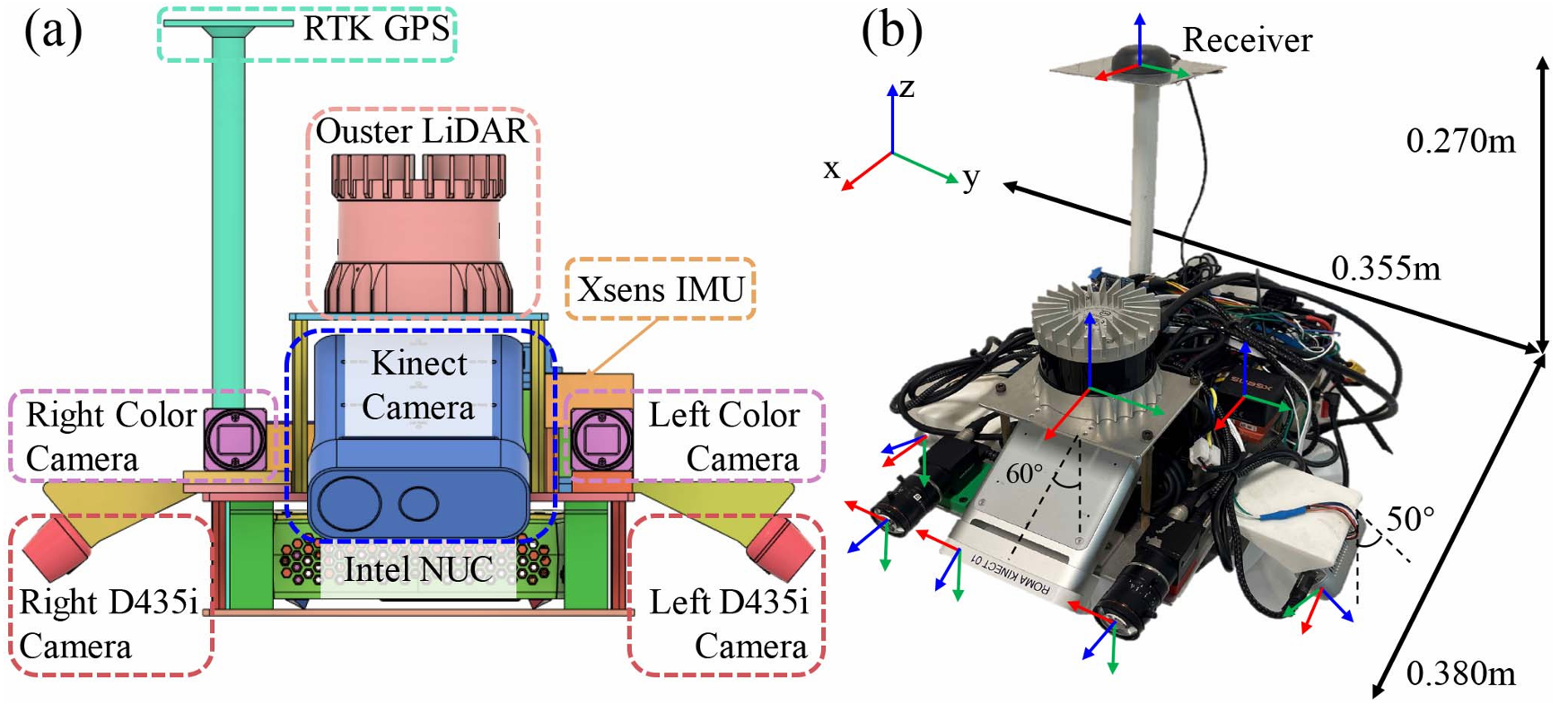
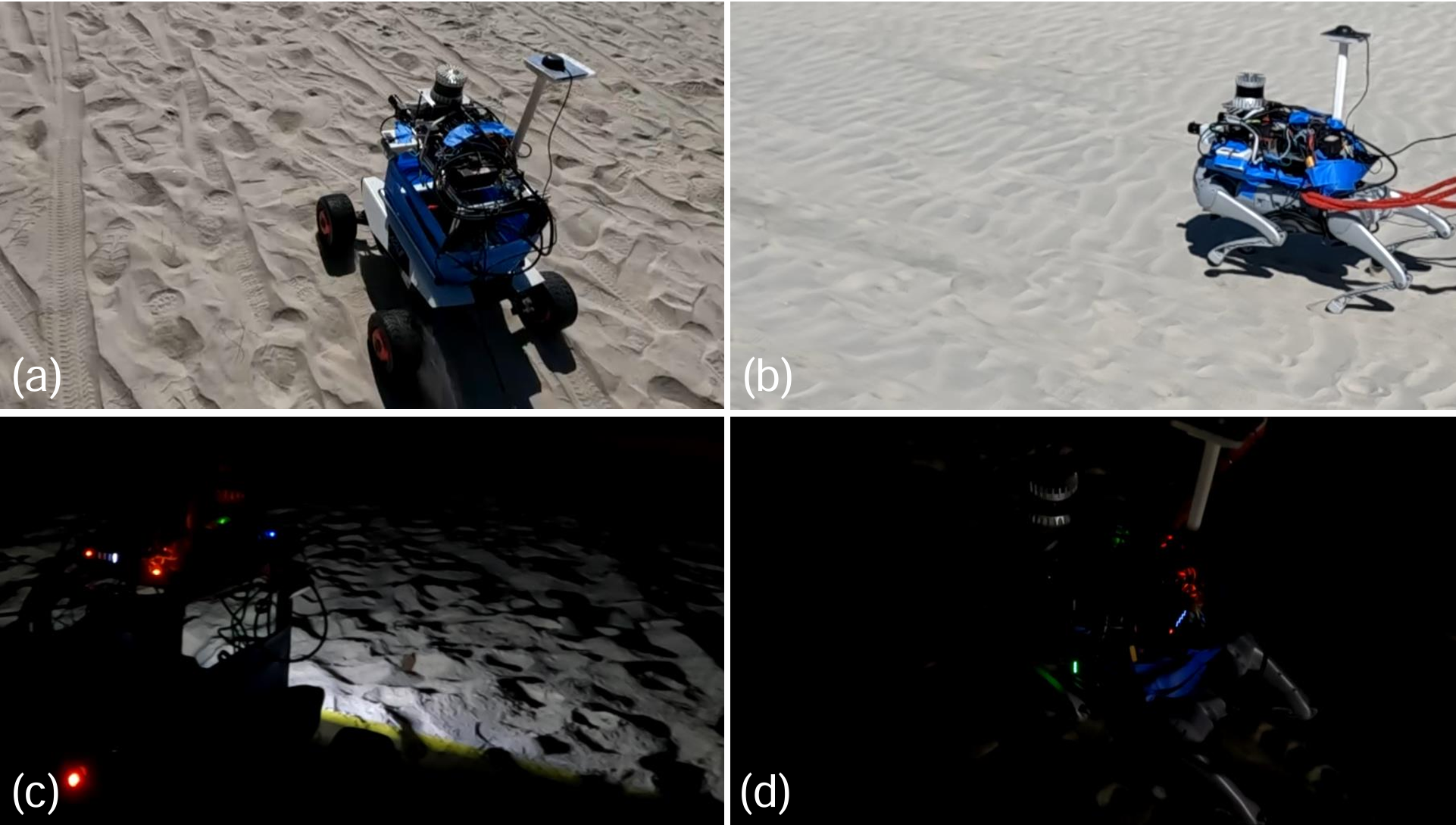
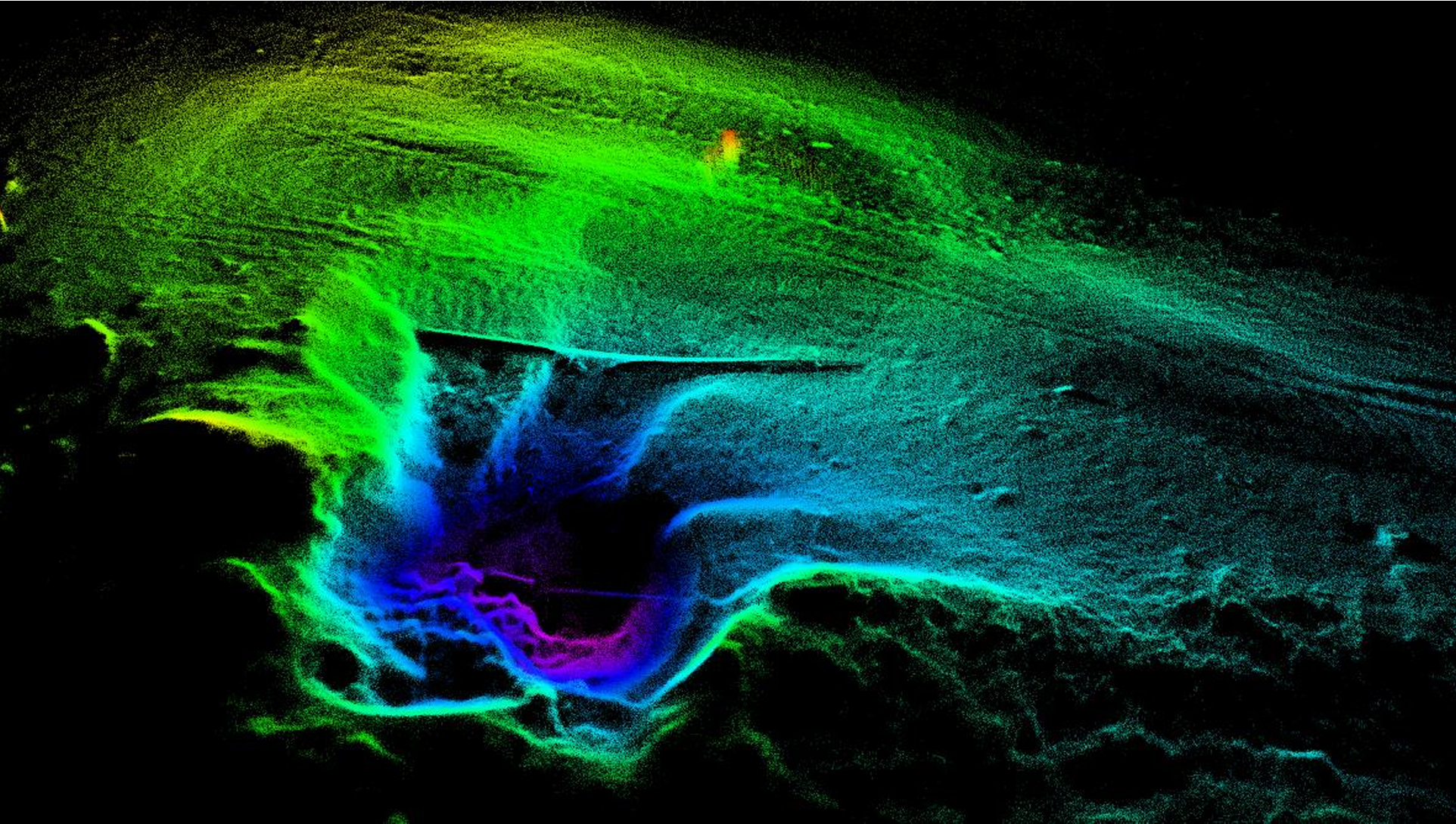
TAIL: A Terrain-Aware Multi-Modal SLAM Dataset for Robot Locomotion in Deformable Granular Environments
Chen Yao*, Yangtao Ge*, Guowei Shi*, Zirui Wang*, Ningbo Yang, Zheng Zhu, Hexiang Wei, Yuntian Zhao, Jing Wu, Zhenzhong Jia** IEEE Robotics and Automation Letters (RA-L), 2024 Paper / Website We designed a sensor suite for mobile robots, featuring RGBD cameras, Lidar, IMUs, and a global positioning system. Using this setup, we collected a comprehensive multi-modal SLAM dataset focused on robot locomotion over deformable granular terrains. |
|
Adaptive Planar Foot with Compliant Ankle Joint and Multi-modal Sensing for Quadruped Robots
Guowei Shi*, Chen Yao*, Wenhui Wang, Zheng Zhu, and Zhenzhong Jia** IEEE International Conference on Robotics and Biomimetics (ROBIO), 2022 Paper We designed a multi-modal sensorized planar foot for quadruped robots, equipped with IMUs, joint encoders, and force/torque sensors, enabling accurate estimation of local surface inclination and contact forces. |
|
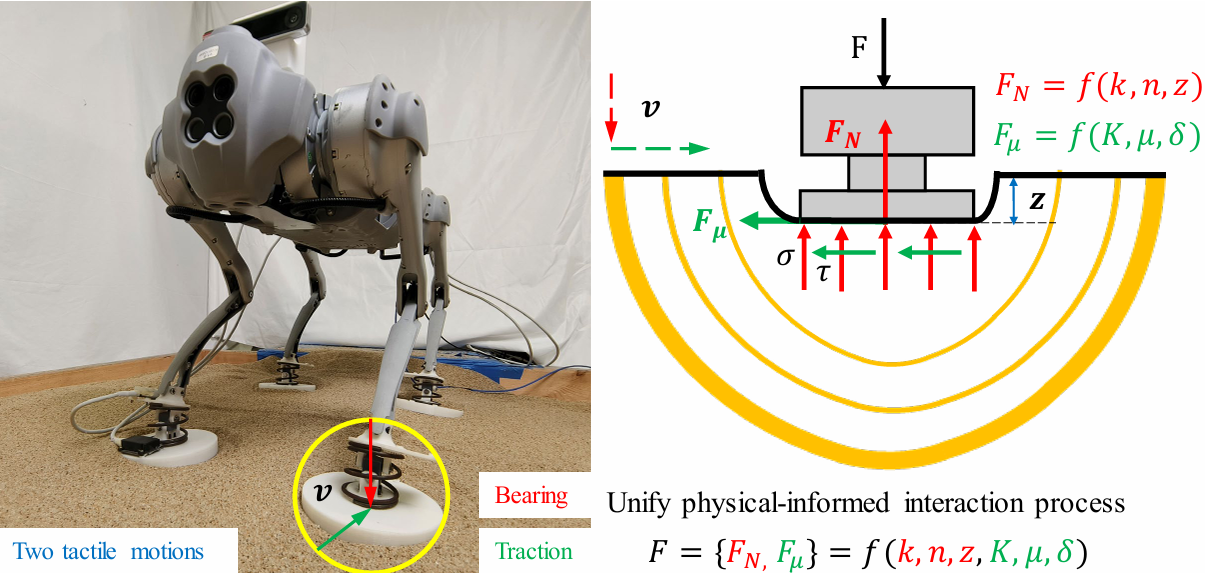
Predict the Physics-Informed Terrain Properties over Deformable Soils using Sensorized Foot for Quadruped Robots
Chen Yao*, Guowei Shi*, Yangtao Ge, Zheng Zhu, and Zhenzhong Jia** IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), 2023 Paper We analyzed foot-terrain interactions on deformable soils using sensorized feet, providing physics-informed insights to predict terrain properties and improve quadruped robot locomotion in challenging environments. |
|
Are We Ready for Planetary Exploration Robots?
The TAIL-Plus Dataset for SLAM in Granular Environments
Zirui Wang*, Chen Yao*, Yangtao Ge*, Guowei Shi*, Ningbo Yang, Zheng Zhu, Kewei Dong, Hexiang Wei, Zhenzhong Jia, Jing Wu IEEE International Conference on Robotics and Automation Workshop on Field Robotics, 2024 Paper We presented the TAIL-Plus dataset and supplementary materials at the ICRA 2024 Workshop on Field Robotics, offering valuable resources for SLAM research in granular and challenging planetary-like environments. |
|
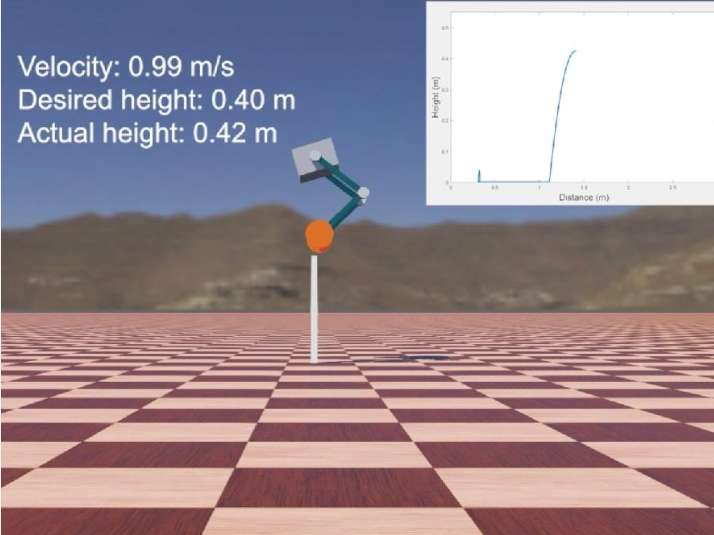
Height Control and Optimal Torque Planning for Jumping With Wheeled-Bipedal Robots
Yulun Zhuang*, Yuan Xu*, Binxin Huang*, Mandan Chao, Guowei Shi, Xin Yang, Kuangen Zhang**, Chenglong Fu** IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), 2021 Paper / Video / Code We present a Wheeled-Bipedal Jumping Dynamics (W-JBD) model for optimizing height control, along with a Bayesian Optimization for Torque Planning (BOTP) method. This joint optimization framework enables precise height control and minimal energy consumption during jumping maneuvers. |
Projects |

|
Control Full-Size Humanoid Robots with QDD Motors (on going)
Prototype We designed a full-sized humanoid robot with 20 degrees of freedom (DoFs) using quasi-direct drive (QDD) motors. The ongoing work involves implementing model predictive control (MPC), whole-body control (WBC), and reinforcement learning (RL) to achieve comprehensive whole-body motion planning. |

|
Control Quadruped Robots with QDD Motors (on going)
Prototype / Video We designed a 20kg quadruped robot with 12 degrees of freedom (DoFs) using quasi-direct drive (QDD) motors. test The ongoing work involves implementing model predictive control (MPC), whole-body control (WBC), and reinforcement learning (RL) to enable comprehensive whole-body motion planning. |

|
Reinforcement Learning-Based Controller for Legged Robots (on going)
Train reinforcement learning algorithm using CTS framework [Ref] and deploy on Unitree A1. |
|
|
Agile Waste Sorting with Tossing (Undergraduate course project)
Paper / Code Implemented automatic image collection and cleaning using the MOG2 algorithm. Deployed and trained YOLOv5 for fast waste classification. Successfully planned and executed robotic arm motions to pick and toss waste onto a dynamic conveyor belt. |
{kind=link}
{kind=link}
Academic Service
|
|
Template from Jon Barron's website. |